Estudio
de localización de interiores Wireless
I.
INTRODUCCIÓN
Los
sistemas de detección en interiores actualmente se han hecho muy populares
últimamente. Estos sistemas proporcionan un nuevo nivel de automatización
que se les llama detección automática de localización de objetos.
Las
aplicaciones son muchas, como la detección de la ubicación de los productos
almacenados en una ubicación de detección de almacén, de personal médico o el
equipo en un hospital, detección de localización de bomberos en una edificio en
llamas, etc.
II.
MEDICIÓN DE PRINCIPIOS Y ALGORITMOS DE POSICIONAMIENTO
No
existe un modelo bueno o eficaz para realizar trayectos múltiples de radio
interior actualmente. A excepción del uso tradicional de triangulación,
algoritmos de posicionamiento mediante el análisis de escena o de proximidad
son desarrolladas para mitigar los errores de medición dirigidos a diferentes
aplicaciones o servicios, estos tres algoritmos tienen único ventajas y
desventajas. Por lo tanto, el uso de más de un tipo de los algoritmos de
posicionamiento al mismo tiempo podría ser mejor rendimiento.
A. La triangulación
La
triangulación utiliza las propiedades de los triángulos para calcular la
ubicación del punto de destino. Tiene dos derivaciones: lateration y
angulación.
Lateration
calcula la posición de un objeto mediante la medición de sus distancias a los
puntos de referencia múltiples. Tambien se les llama técnicas de rango de
medición. En lugar de medir la distancia directamente utilizando intensidades
de señal recibida (RSS) diferencia de tiempo de llegada (TOA) o el tiempo de
llegada (TDOA), la distancia se determinaron calculando la atenuación de la intensidad
de la señal emitida
o multiplicando
la velocidad de la señal de radio y el tiempo
de viaje.
Tiempo de ida y vuelta de vuelo
(RTOF) o
el método de fase
de la señal recibida se
utiliza también para
el rango estimación en algunos
sistemas. Angulación localiza un
objeto informáticos relativos a los
puntos de
referencia múltiples ángulos. En
este estudio, nos centramos en las medidas mencionadas en el
corto alcance
y baja de
antena y
el medio ambiente interior.
1)
Técnicas Lateration:
a)
TOA: La distancia desde el móvil de destino para la medición es directamente
proporcional al tiempo de propagación.
Para
permitir 2-D de posicionamiento, deben ser medidas de los TOA con respecto a
señales de al menos tres puntos de referencia, como se muestra en la figura.

Para los sistemas basados en TOA, la de un solo sentido
tiempo de propagación se mide, y la distancia entre medir unidad y el
transmisor de señal se calcula. En general, directa TOAresults en dos
problemas. En primer lugar, todos los transmisores y receptores en el sistema
tienen que ser precisamente sincronizados. En segundo lugar, una fecha y hora
debe ser etiquetado de la señal de transmisión para que el la unidad de
medición para discernir la distancia que la señal ha viajado.
Existen otros algoritmos de TOA de
localización en interiores sistema como el más cercano al vecino (CN) y la
ponderación residual (RWGH). El algoritmo CN estima la ubicación de
la ubicación de la estación base o punto de referencia que se encuentra
más cercano al usuario. El algoritmo puede ser RWGH básicamente considerarse
como una forma de ponderada de mínimos cuadrados algoritmo.
Es
conveniente para la LOS, no-LOS (NLOS) y se mezclaron LOS / NLOS las
condiciones del canal.
.
b)
TDOA: La idea de TDOA es determinar la relación posición del transmisor móvil
mediante el examen de la diferencia en el tiempo en que la señal llega a las
unidades de medida múltiples, en lugar de la hora de llegada absoluta de TOA.
Para cada TDOA medición, el transmisor debe estar en un hiperboloide con una
diferencia de distancia constante entre las dos unidades de medición. La
ecuación del hiperboloide es dada por:

donde
(xi, yi, zi) y (xj, yj, zj) representan los receptores fijos i y j, y (x, y, z)
representa la coordenada de la meta. Excepto las soluciones exactas a la
ecuación hiperbólica TDOA se muestra en la ecuación anterior por medio de
regresión no lineal, una solución más fácil es para linealizar las ecuaciones
mediante el uso de una serie de Taylor expansión y crear un algoritmo
iterativo.
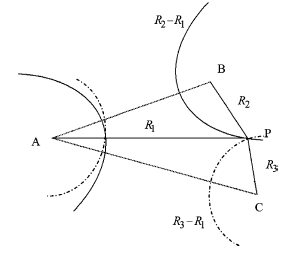
Una
ubicación de destino 2-D puede estimarse a partir de las dos intersecciones de
dos o más mediciones TDOA, como se muestra en la figura de arriba. Dos hipérbolas
se forman a partir de mediciones TDOA menos tres unidades fijas de medición (A,
B, y C) para proporcionar una intersección punto, que localiza el blanco P.
Los
métodos convencionales para calcular estimaciones TDOA son el uso de técnicas
de correlación. TDOA puede estimarse a partir la correlación cruzada entre las
señales recibidas en un par de las unidades de medición. Supongamos que para la
señal transmitida s (t), la señal recibida en la unidad de medición i es xi
(t). Supongamos que xi (t) es corrompido por el ruido ni (t) y un retraso de
di, entonces xi (t) = s (t - di) + ni (t). De manera similar, la señal xj (t)=
s (t - dj) + nj (t), que llega a la medición de la unidad j, se retrasa y dj
corrompida por el ruido nj (t). La función de correlación cruzada de estas
señales está dada por la integración del producto desfase de dos señales
recibidas durante un período de tiempo T

La
estimación TDOA τ es el valor que maximiza Rxi, xj (τ), es decir, las
diferencias de rango. Este enfoque requiere que la medición unidades comparten
una referencia de tiempo precisa y señales de referencia, pero no impone
ninguna obligación a cargo del móvil de destino.
Técnicas
de procesamiento de dominio de frecuencia se utilizan generalmente para
calcular τ. Salvo los últimos métodos TDOA, un retraso basada en la edición
método de medición TDOA se propuso para el 802. 11 LAN inalámbricas, que
elimina el requisito de sincronización inicial en los métodos convencionales.
c)
basado en RSS (o atenuación de la señal-Based) Método:
Estos
dos sistemas tienen algunos inconvenientes. Para ambientes interiores, es
difícil encontrar un canal entre el transmisor y el receptor. Radio propagación
en entornos tales sufriría de efecto multitrayecto. El tiempo y el ángulo de
una señal de llegada se vería afectado por el efecto de trayectos múltiples,
por lo la precisión de la localización estimada podría ser disminuido.
d)
RTOF: Este método consiste en medir el tiempo de vuelo de la señal que viaja
desde el transmisor a la unidad de medición y de nuevo, se llama la RTOF (véase
la fig. 1). Para RTOF, una más moderada requisito relativo sincronización de
reloj reemplaza el encima de las necesidades de sincronización en TOA. Su rango
de medición mecanismo es el mismo que el de la TOA. La medición unidad se
considera como un radar común. Un transpondedor de destino responde a la señal
de radar interrogador, y completa la tiempo de propagación de ida y vuelta se
mide por las unidades de medición.
Sin
embargo, sigue siendo difícil para la unidad de medición para conocer la
exacto
retardo / tiempo de procesamiento causada por el respondedor en este
caso.
En los sistemas de largo alcance o de medio alcance, este retraso
podría omitirse si es pequeño, en comparación con el tiempo de
transmisión.


e)
Relación señal recibida Método Fase: La señal recibida método de fase utiliza
la fase de la portadora (o diferencia de fase) a estimar el rango. Este método
también se conoce como fase de llegada (POA). Suponiendo que todas las
estaciones de transmisión emite puro señales sinusoidales que son de la misma
frecuencia f, con cero desplazamiento de fase, con el fin de determinar las
fases de las señales recibidas en un punto de destino, la señal transmitida
desde cada transmisor para el receptor necesita un retardo de tránsito finito.
III. Métricas
de rendimiento
No es suficiente para medir el
rendimiento de un posicionamiento
técnica sólo mediante
la observación de su
exactitud. Haciendo
referencia a y
teniendo en cuenta la
diferencia entre el interior
y exterior inalámbrico
geolocalización, le ofrecemos la siguiente evaluación
comparativa de rendimiento para el sistema de localización inalámbrica de
interior: exactitud, precisión, complejidad, escalabilidad,
robustez, y
el costo.
A. Precisión
Precisión (o ubicación de error) es el
requisito más importante
de los
sistemas de posicionamiento.
B.
Precisión
La
precisión de la localización considera cómo constantemente el sistema obras, es
decir, es una medida de la robustez de la localización técnica, ya que revela
la variación de su desempeño.
C.
Complejidad
En
el algoritmo de posicionamiento sí el cálculo de la localización se realiza en
un servidor centralizado, el posicionamiento se puede calcular rápidamente
debido a la potente capacidad de procesamiento y el suministro de energía
suficiente. Si se lleva a cabo en el lado de la unidad móvil, los efectos de la
complejidad puede ser evidente.
La
mayoría de las unidades móviles carecen de potencia de procesamiento y de larga
duración de la batería, de modo que, preferiríamos algoritmos de
posicionamiento con baja complejidad.
D.
Robustez
A
veces, la señal de un transmisor de la unidad está totalmente
bloqueado, por lo que la señal no se puede obtener a partir de algunas
unidades de medición.
E.
Escalabilidad
A
medida que más superficie / espacio está cubierto o unidades están
hacinados en un área / espacio, los canales de señal inalámbrica pueden
estar congestionadas, más cálculo puede ser necesaria para realizar el
posicionamiento ubicación, o más infraestructura de comunicación puede ser
requerida.
F.
Costo
El
costo de un sistema de posicionamiento puede depender de muchos factores.
Los
factores importantes incluyen el dinero, el tiempo, el espacio, el peso y la
energía.
El
factor de tiempo está relacionado con la instalación y el mantenimiento.
Conclusiones:
Este
trabajo estudia las técnicas actuales de posicionamiento en interiores y
sistemas. Se ven los diferentes criterios de medición de desempeño, y estas se
discuten.
Por
Ejemplo, la que existe entre la complejidad y la exactitud / precisión requiere
una cuidadosa consideración cuando elegimos los sistemas de
posicionamiento y técnicas para entornos de aplicaciones diferentes tales
como el almacenamiento, la robótica, o de emergencia. Generalmente, la
localización esquema de toma de huellas dactilares es mejor para zonas abiertas
mientras Activo RFID es adecuado para entornos densos. En términos de
escalabilidad y disponibilidad, estas técnicas de posicionamiento y tienen
sistemas sus propias características importantes cuando se aplican en entornos
reales.
La
elección de la técnica y tecnología significativamente afecta a la granularidad
y la exactitud de la información de ubicación.
Bibliografía :
1 comentario:
OK; 7 pts.
Publicar un comentario